
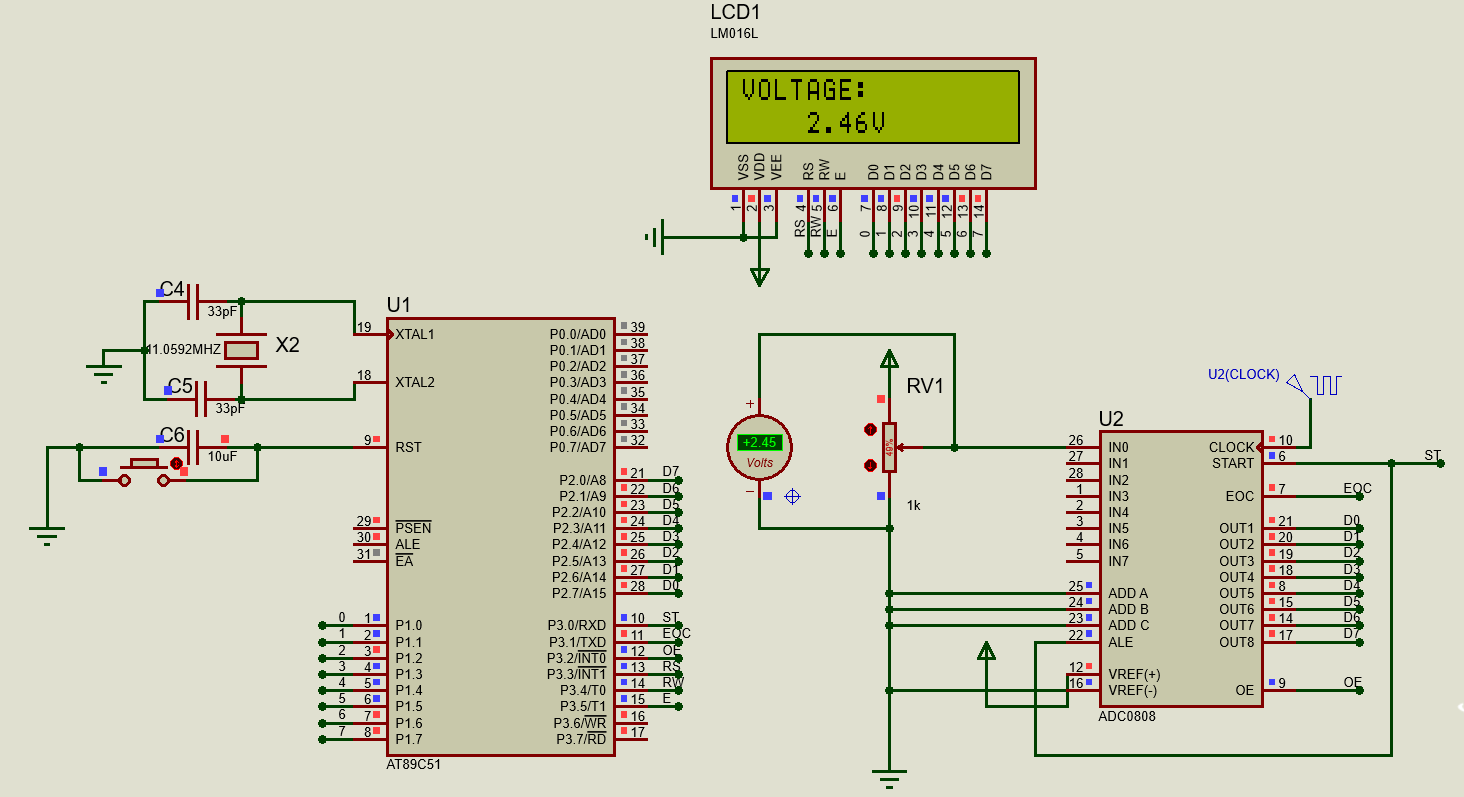
AD转换
代码
1 | /* |
直流电机
直流电机的控制:
方向控制:直流电机只有正负极,只需交换正负极就可以调节正反转。
转速控制:负载变化不大的时候,加在直流电动机两端的电压大小与其速度近似成正比。
PWM技术:
电动机的电枢绕组两端的电压平均值U为:$D = \frac{t_1}{T}U=DU_s$
D为PWM的占空比:$D = \frac{t_1}{T}$
占空比:一个周期之内高电平的时间与整个周期时长之比。范围:0~1
L293D 芯片:
顺时针转动:最大转速192
代码
1 | /* |

步进电机
- 驱动芯片:L298
- 四相步进电机四步法和八步法:四步法:给ABCD引脚给控制信号:1001、1100、0110、0011步进电机顺时针转动。八步法:四步法的一半,1001、1000、1100、0100、0110、0010、0011、0001
- 四步法转动角度大,更平滑。八步法转读角度小,但是能够实现更高的转速
代码
1 | /* |
